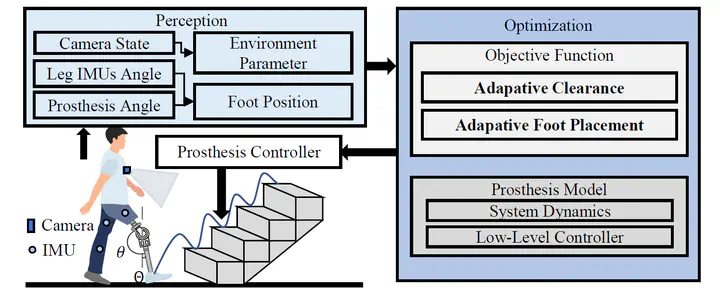
 Illustration of the framework for powered knee prostheses to perform stair ascent
Illustration of the framework for powered knee prostheses to perform stair ascent
Abstract
Stair ascent control for powered knee prostheses during swing phase presents a multi-objective challenge, requiring simultaneous optimization of foot clearance and placement. Existing Finite State Machine (FSM) based approaches struggle to effectively integrate multi-source information and balance competing control objectives. This paper proposes a novel optimization-based framework that transforms environmental and human motion information into objectiveoriented representations through a chest-mounted camera and leg-mounted IMUs. These representations are then integrated into a unified optimization framework to generate prosthetic trajectories that simultaneously satisfy both clearance and foot placement objectives. Experimental results demonstrate that our approach achieves superior performance in maintaining appropriate clearance while ensuring optimal foot placement compared to traditional FSM-based methods, offering a more systematic solution for powered prosthetic stair ascent control.