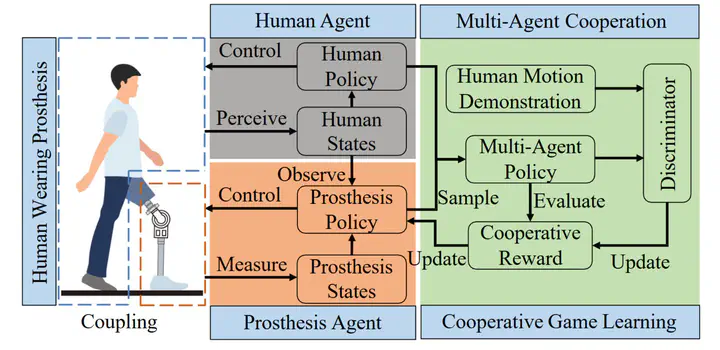
 Illustration of the Human-Prosthesis Interaction
Illustration of the Human-Prosthesis Interaction
Abstract
Lower-limb powered prostheses traditionally rely on structured, phase-based controllers designed for specific movement patterns, limiting their adaptability to diverse human motions. This paper presents that powered prosthetic control is a cooperative multi-agent game between the human user and the prosthetic device, as both agents must coordinate their actions actively and adapt their policy reciprocally for successful prosthetic motions. Based on this insight, we develop a model-free reinforcement learning framework that enables the prosthesis to adapt to diverse human movement patterns through cooperative policy learning. Preliminary results in the simulator demonstrate that our framework can generate human-like motions across both walking and complex tasks, establishing the effectiveness of viewing prosthetic control through the lens of multi-agent cooperation. This work opens new possibilities for developing more intuitive and versatile prosthetic systems that naturally synchronize with human movement intentions.